事象発生日:2019-03-13
記事公開日:2019-03-28
アクセス数:5857
Raspberry Pi 3
Ubuntu Server 16.04.5 LTS (Xenial Xerus)
Node.js v10.14.2
ROS kinetic
UVC対応カメラ:LOAS MCM-15W
Raspberry Pi 3 Model B
Ubuntu Server 16.04.5 LTS (Xenial Xerus)
Node.js v10.14.2
Microsoft Windows 10 Home 1803 (64bit)
Google Chrome 71.0.3578.80 (Official Build) (64bit)
Firefox Quantum 65.0.2 (64bit)
どうやら,,ChromeブラウザからPCのマイクへアクセスするにはサイトがHTTPSであることが必須なようで,SSL化するのがめんどうだったのでFirefoxで検証した.
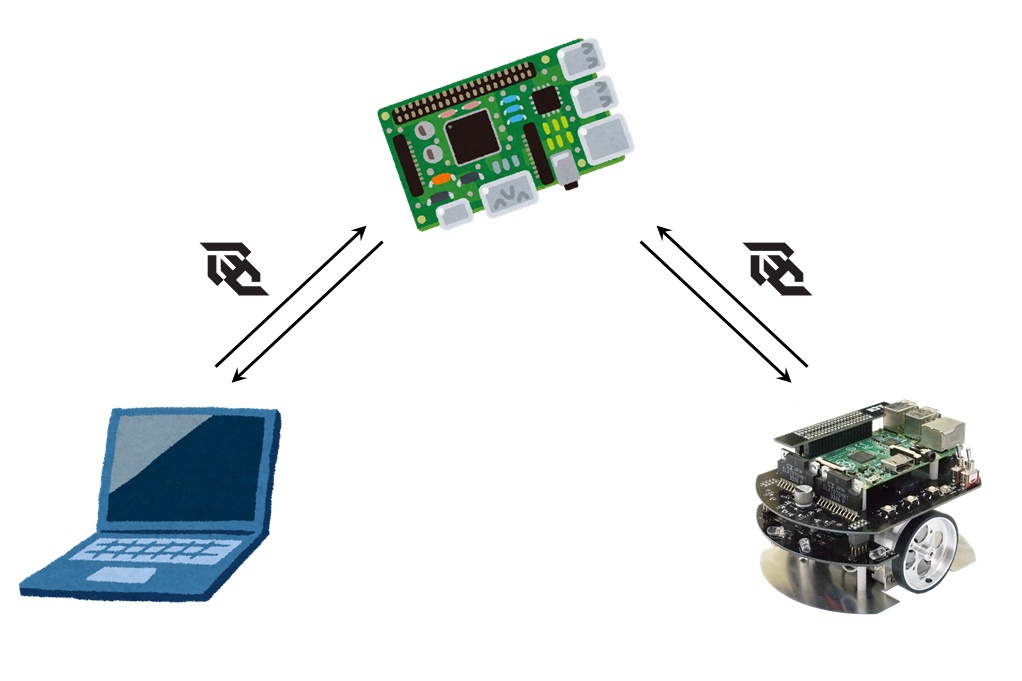
ロボット,中継サーバー,遠隔PC,ともにWiFiによって同一LANにいる.
(原理的には,中継サーバーのみグローバルIPを持っていればよい.)
前回からのアップデートは,
| WebSocketをちゃんと実装して,無駄な通信をなくす | |
| 双方向音声通信を実装 | |
| クライアント,ロボットが複数いても,選択して操作可能 |
など.
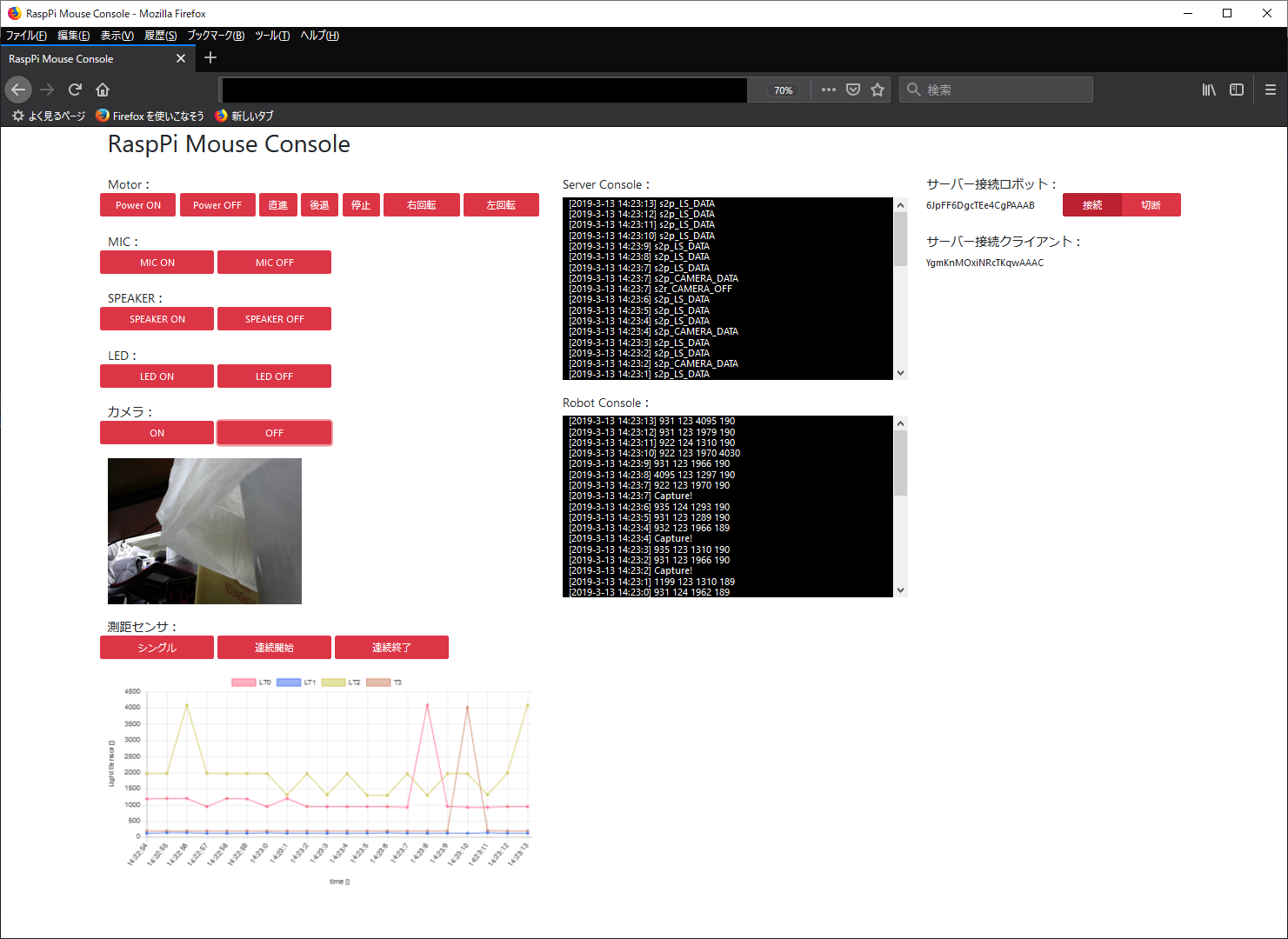
結果として,ブラウザでひらく操作画面はこんな感じとなった.
右側でロボットを選択して接続し,左側で操作する.
中央には,中継サーバーとロボットのコンソールがそれぞれ表示される.
雑ですが,動画はこんな感じ.
まだまだ遅れが気になるレベル...
ソースコードはすべてGitHubに上げた.
また,実装のダイジェストは別ブログ,
| Raspberry Pi Mouse / Catを中継サーバー経由で遠隔操作 | RT MicroMouse | |
| Raspberry Pi Mouse / Cat を遠隔操作(音声通話編) | RT MicroMouse |
に乗せてある.
名前
Email (※公開されることはありません)
コメント